

Research
We are mainly engaged in the applied basic research of hydrodynamics, structural mechanics, ship vibration & noise reduction and development of deepsea vehilces and high performance ships.
 Position:Research >
Position:Research >
Emerging Technologies
-
Research Directions
 • Innovation and development strategy in the marine field
• Innovation and development strategy in the marine field
• Maritime operation and new concept equipment demonstration
• Overall technology of complex system modeling and simulation
• Ship virtual reality and visualization application technology
• Marine digital twinning and simulation application technology
• Independent R&D of large CAE software for ship industry
• Ship performance data governance and application technology
• Marine information fusion, intelligent perception and target recognition
• Intelligent control and autonomous navigation of ships in complex marine environment
• Control and formation coordination technology of unmanned surface vehicle cluster
• Full chain test and verification system of unmanned surface vehicle
• Research and development of intelligent unmanned system and product development
-
Research Results
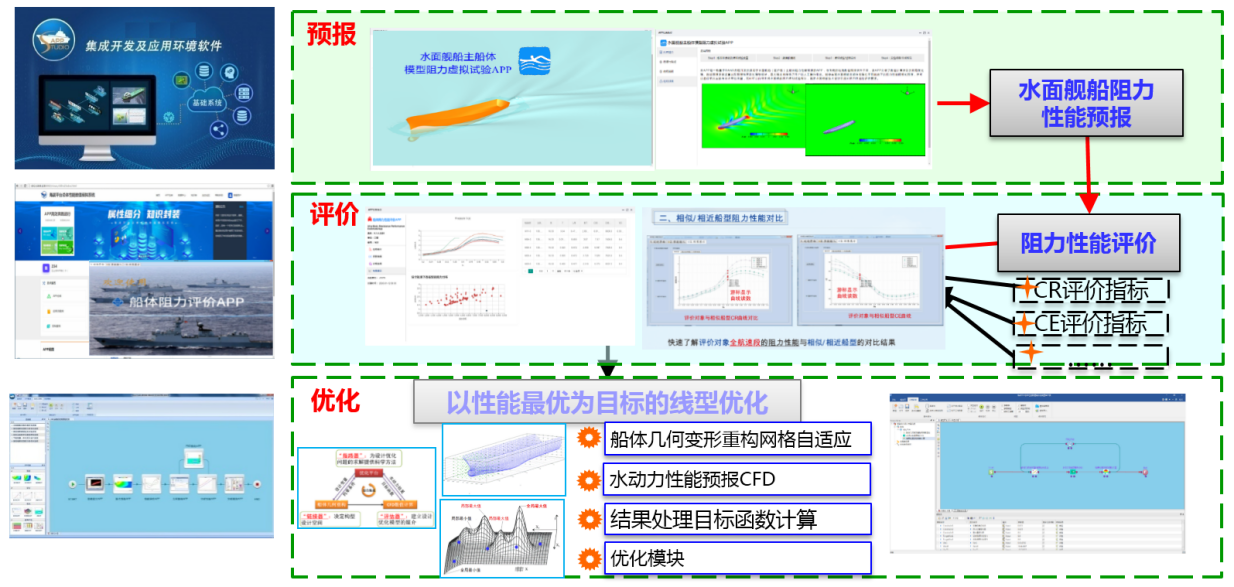 Integrated platform for offshore performance simulation and optimization:
Integrated platform for offshore performance simulation and optimization:
In response to the development demands of ship overall performance in a new era and by generating new increments with our existing data resources, we actively research and develop the integrated platform for offshore performance simulation and optimization with self-developed software and historical test data. Relevant R&D efforts include deep integration of the research system of ship overall performance and the application technologies of computational engineering. At present, the platform is online for trial operation and certain achievements have been made.
Application of AI technology in propeller design:
Thanks to abundant propeller model test data and AI tools, algorithms and technologies including data mining, feature engineering and brain-inspired intelligence, we have developed and deployed a proxy model of propeller hydrodynamic performance prediction featuring strong robustness and generalization ability. The model has a prediction error less than 5%, gives responses within milliseconds and evolves with data increase.
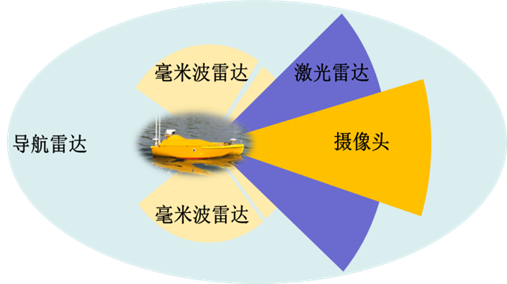
Integrated perception software and hardware system of intelligent ship:
We integrated various sensing devices including lidar, millimeter wave radar and visible/infrared vision devices, realizing fusion of multi-source heterogeneous information at space, time and information levels. This solved the problems of poor environmental adaptability and high virtual scene rate caused by relying on a single sensing device, and combined the advantages of different sensing devices in terms of detection distance, angle, resolution and application, significantly improving situational awareness and understanding ability.
Unmanned autonomous navigation system and intelligent controller of ships:
For moving targets on water surface, we developed a tracking algorithm based on fuzzy rules. With the algorithm, we realized continuous and stable tracking of surface moving targets, made breakthrough in terms of the technologies of regional route autonomous planning and autonomous collision avoidance, and realized the demonstration and verification of operation process. In possession of control logic and control protocols of various hardware devices, we realized miniaturization and high integration of the unmanned surface ship control system, reduction of controller volume and system power consumption, and application of key technologies on several types of products.
Intelligent unmanned surface vehicles:
Focusing on the application of intelligent and unmanned technology in the field of ships, we continued to tackle key problems, built the overall design capability of unmanned surface ships, and successively completed the design, research and development of more than 10 types of large, medium and small unmanned surface ships for both military and civilian use.
-
Technical Service
 • Design and demonstration of maritime operation concept and new equipment
• Design and demonstration of maritime operation concept and new equipment
• Development of marine environment and equipment motion simulation system
• Development of ship virtual reality and visualization system
• Development of digital twin system for marine equipment design and application
• Development of intelligent system and data application platform for ship performance prediction and optimization
• Development of integrated perception software and hardware system of intelligent ship
• Unmanned modification and development of autonomous navigation system of ship
• Development of integrated information management system and shore-based software system of intelligent ship
• Research and development of intelligent unmanned systems and products for environmental monitoring, marine survey, maritime law enforcement and military application